
Hi,
This week, our design mentor Alois passed on the advice to plunge ahead when one has about 70% of the information, enough to not go into a prototyping blind but not too much as to pointlessly consume time and effort. Although knowing that there are still unknowns can be off-putting, as of this blog, I can assuredly say that our team has reached that 70% threshold.
After getting perspectives from a registered nurse and midwifery student from Malawi, and a pediatrician and former NICU nurse from the United States., we reaffirmed the direction of our project. Additionally, our contacts offered some unique insights into learning the New Ballard Score. Since the Ballard Score has so many signs that a nurse must check (13 total), recalling them all can be difficult, especially since there is no simple mnemonic or other memory devices, unlike the APGAR score. Thus, our project has the unique opportunity to help reinforce recall of the signs by, for example, grouping the various assessments via anatomical proximity on our model. Another insight we gained was that, currently, the curriculum in Malawi often only spends about an hour on Ballard scoring. To me, this short time suggests that the Ballard score is a skill expected of nurses to be responsible for honing on their own, a sentiment also echoed by clinicians from the United States. As such, we might need to consider whether we should frame the device as something a nurse can practice without an instructor or outside the classroom. Finally, we learned about the issue of the Ballard assessment being subjective, as scoring each sign requires a degree of judgment. As such, a new priority for us has been thinking about integrating a stopping mechanism for the joints so they can accurately represent various scores for each sign, providing for a consistent standard for nursing students.
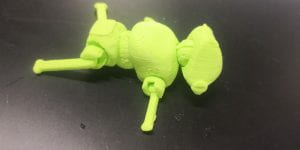
Our team also began some preliminary tinkering for our project. We 3D printed some joints to study, namely the articulated joints on the robot and the ball-and-socket joint. Our primary consideration has been the shoulder joint, which, though technically a ball-socket joint, has a much greater range of motion than what we printed. In the human body, the “socket” is much less a hemisphere and more of an indent in the bone – the ligaments and muscle tissue holding the ball in place. However, as this structure is hard to replicate, the 3D printed humanoid model’s dual joints for the shoulder – a wheel and axle combined with a hinge joint – inspired us. So far, it is our front-runner for the shoulder joint.

Finally, the baby doll we ordered last week also arrived, helping us gauge the sizes of the extremities. If all else stays the same, this doll is likely the one on which we will perform modifications to achieve the final manikin. Our examination and measurement taking, unfortunately, has meant that we had to separate its limbs (which is why an arm is missing in the photo). I imagine if an onlooker, wholly unaware of the context of our actions, had seen us pulling apart the arms and legs, they would have perceived us as quite unhinged. I guess one has to prepare for anything during engineering design.

Later,
Andrew Sun